 Vision-based tactile sensors have the potential to provide important contact geometry to localize the objective with visual occlusion. However, it is challenging to measure high- resolution 3D contact geometry for a compact robot finger, to simultaneously meet optical and mechanical constraints.
Vision-based tactile sensors have the potential to provide important contact geometry to localize the objective with visual occlusion. However, it is challenging to measure high- resolution 3D contact geometry for a compact robot finger, to simultaneously meet optical and mechanical constraints.
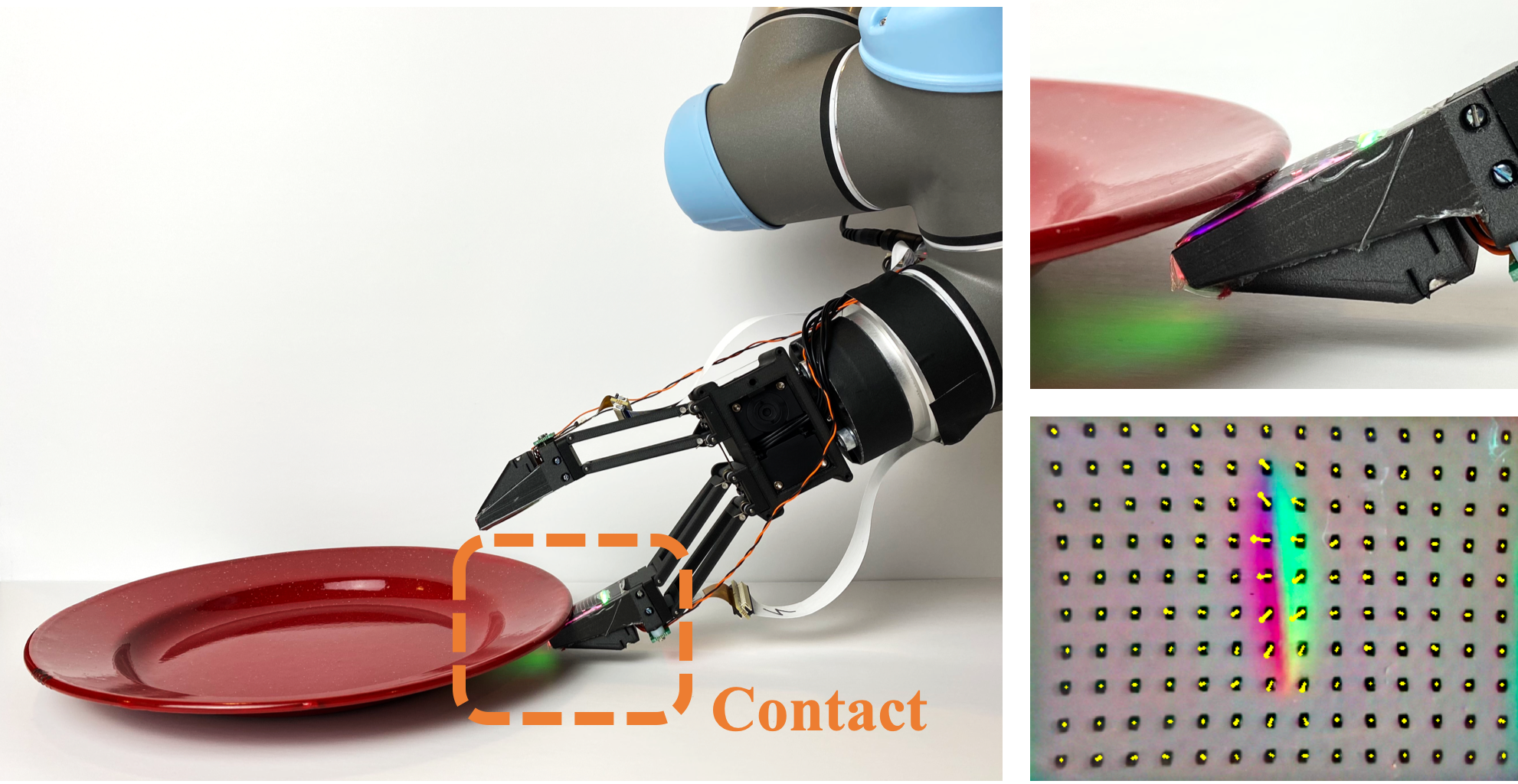
In this work, we present the GelSight Wedge sensor, which is optimized to have a compact shape for robot fingers, while achieving high- resolution 3D reconstruction. We evaluate the 3D reconstruction under different lighting configurations, and extend the method from 3 lights to 1 or 2 lights. We demonstrate the flexibility of the design by shrinking the sensor to the size of a human finger for fine manipulation tasks. We also show the effectiveness and potential of the reconstructed 3D geometry for pose tracking in the 3D space.




